This project is still ongoing, so this page is not complete yet
Robotic Arm
I started this project on the 10th of March 2025. A robotic arm has always been a project on my list, and I've never had a good reason to build it. After taking a break from my Ball Balancing Robot, I thought of a different project to work on. And during the previous year of projects, I built up a small pile of resistors and that is too much effort to sort. So, what better way to sort them then building an incredibly overengineered robotic arm to do so, using computer vision and cycloidal drives. This might not be the best reason to build a robotic arm. But do I really need a good reason to start a journey where I will improve my knowledge and engineering skills?
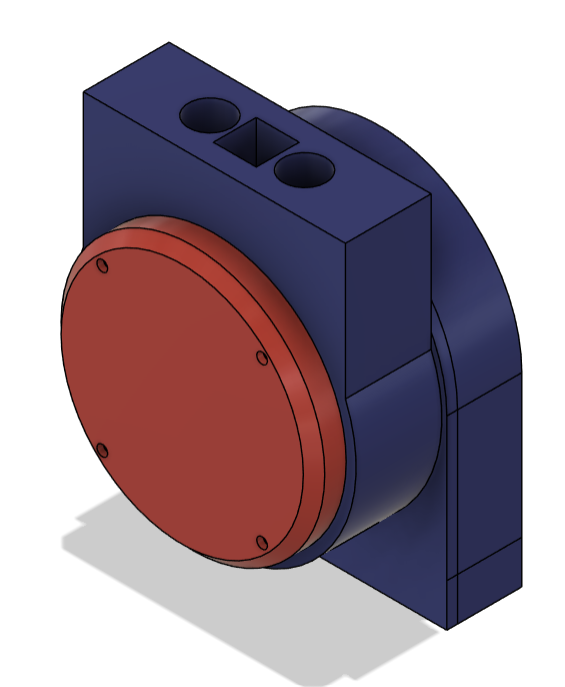
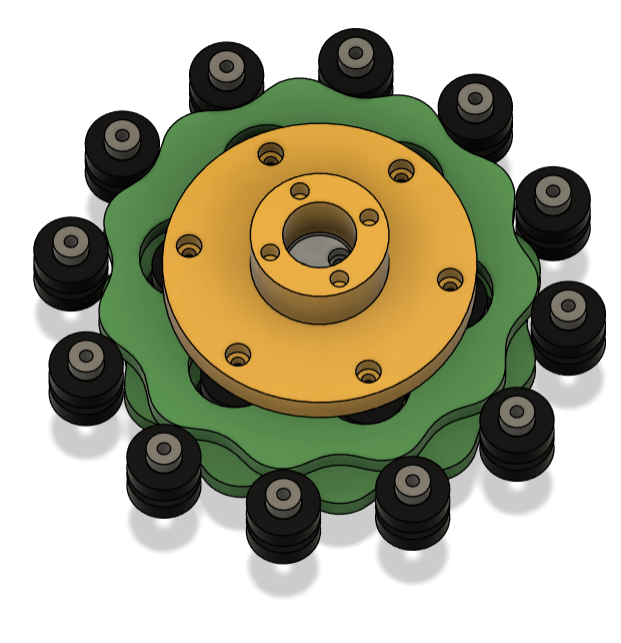
The photo on the left is a 12:1 reduction cycloidal drive, designed using parametric equations (Desmos) and Fusion 360. A cycloidal drive is a high reducing gearing with no backlash. It works by a motor spinning an eccentric bearing rotating two cycloidal discs. These discs are 180 degrees out of phase with each other which prevents the backlash. The discs engage with the pins and turn the output shaft at a reduced speed and a much higher torque.